Precise movement data of traffic participants is essential for analysing behaviour and developing safe traffic systems. Therefore, collecting precise and high frequency trajectories from vehicles, cyclists and pedestrians at urban intersections using LiDAR or other sensors is essential. Salzburg Research provides a software-as-a-service solution for efficiently processing and storing high frequency trajectories from different sensor sources for real-time and historical data analyses. Via a Roadside ITS Station (R-ITS-S), safety-relevant information can also be received or sent via ITS G5 messages directly to connected vehicles or other traffic participants.
What are Cooperative Intelligent Transport Systems (C-ITS)?
Cooperative Intelligent Transport Systems (C-ITS) connect traffic participants with each other and with the infrastructure and are considered a promising approach to increase safety and efficiency of mobility. Especially in urban environments, traffic situations are often complex, and traffic participants’ perception is sometimes reduced by occlusion due to roadside buildings or other traffic participants. Through the communication between vehicles and between vehicles and the infrastructure, a collective perception can be created. Such a communication channel is the foundation for detecting dangerous situations early and sending out warnings.
Connected and autonomous vehicles can perceive their surrounding environment and communicate their state and the state of perceived objects. Since the share of connected vehicles is still relatively low, connected vehicles often are depending on infrastructure-based perception. Especially for the transformation towards fully autonomous transport, this interplay of automated vehicles and infrastructure is often seen as necessity for the transition phase, in which autonomous and manually driven vehicles have to participate in traffic at the same time.
Furthermore, C-ITS can increase the safety for all traffic participants, especially for so called vulnerable road users such as bicyclists and pedestrians. High-quality movement data contributes to safety-related research.
Research intersection in Salzburg

For exploring collective perception scenarios, Salzburg Research in cooperation with Alp.Lab operates a C-ITS-enabled research intersection in the City of Salzburg. It provides the necessary hard- and software components to process, store and analyse various kinds of traffic-related data, such as C-ITS messages, movement of traffic participants and traffic light phases.
A Roadside C-ITS Station (R-ITS-S) from Kapsch TrafficCom provides interfaces to receive and send ITS G5 messages including status information of traffic participants, information on traffic light phases or warning messages. Through receiving messages from connected vehicles, the R-ITS-S serves as a data source for infrastructure-based C-ITS applications or historical analyses. Through sending out traffic-relevant information from the infrastructure to connected vehicles, the R-ITS-S also serves as a data source for any connected vehicle.
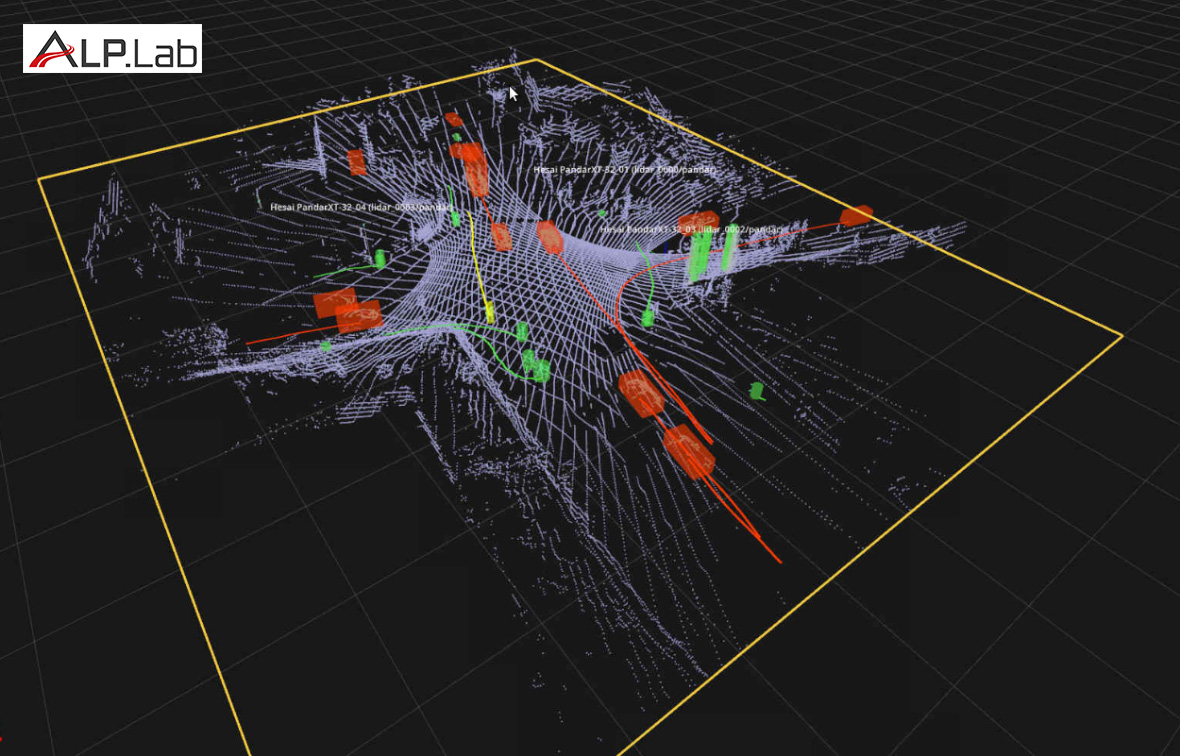
A LiDAR-based Multiple-Object-Tracking system precisely captures the movement of every vehicle, cyclist, and pedestrian at the intersection. The movement information can be used for infrastructure-sided C-ITS applications, sent out in the form of ITS G5 messages via the R-ITS-S or it can be stored and used for later analyses.
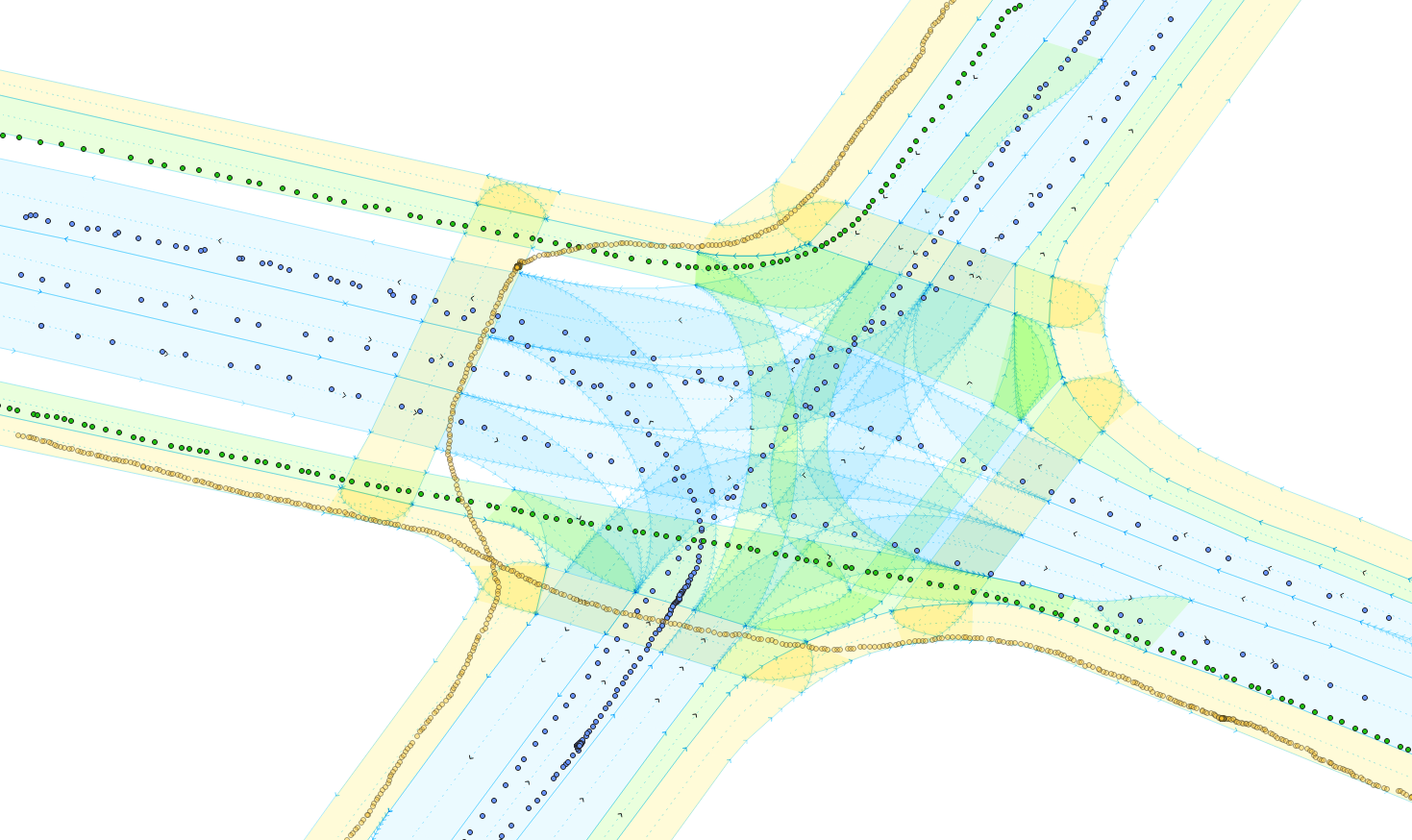
Moreover, a lane-accurate digital map of the intersection is available. It describes the characteristics of individual lanes (e.g., pavement or vehicle lane, kerbstone as boundary) and the semantic relationships between the lanes (e.g., parallel adjacent, but lane change not permitted).
Additionally, the above-mentioned data sources are connected to FlowMotion, a software-as-a-service solution tailored to process and store large amounts of movement data efficiently for historical analyses. It is also suited to run (real-time) applications on this data. Therefore, it can be used to develop and evaluate C-ITS applications.
LiDAR-based Multi-Object Tracking system for precise, high frequency traffic trajectories of vehicles, cyclists and pedestrians
In 2022 and early 2023, the research intersection was a medium sized, four-armed crossroad. It was equipped with four LiDAR sensors, one at each corner of the intersection oriented towards the centre of the intersection. This way, four sensors capture objects in the centre of the intersection and two sensors capture leaving or approaching objects up to a distance of 80m. This layout reduces the effects of occlusion by other objects and results in high quality movement data. A perception software processes the raw LiDAR point clouds on the edge and provides object data with a frequency of 8 Hz.
In our current research, we investigate methods to evaluate the quality of traffic trajectories from such a Multi-Object Tracking (MOT) system directly and without the need for manually annotating raw point clouds. Our approach is application-oriented, in that we are investigating methods for determining the quality of a particular dataset with respect to the requirements of further applications, rather than methods for validating the functionality of the tracking system per se. In the upcoming years, we plan to use these detailed trajectories, a lane-accurate digital map of the intersection, and data of traffic light phases to develop methods for analysing the behaviour of traffic participants and to identify safety risks. The aim is to provide important insights for the improvement of intersection layouts regarding comfort and safety of traffic participants with the focus being on vulnerable road users, such as cyclists and pedestrians.
Our LiDAR system has collected data for almost a year at the research intersection. With March 2023, we moved the equipment to another, more complex intersection and run the same system in an extended variant with six LiDAR sensors.
FlowMotion – Software-as-a-service solution to manage traffic movement data and run algorithms in real-time
The large amount of data acquired by the LiDAR and C-ITS system at our research intersection requires a solution to manage and store movement data from different sources. Moreover, for developing and testing C-ITS applications we needed a system to run algorithms on this data in real time. We have therefore developed FlowMotion, a streaming architecture software that fulfils these requirements efficiently. A special asset is its ability to unify movement data from different sources with respect to form and content in a mutual trajectory format. For example, two sources might name object classes differently, e.g., “bicycle” and “bike”. By unification to a mutual schema, subsequent applications can use data from any source with ease. This schema also includes the possibility to store additional data from any internal sensor of the corresponding object. Moreover, it provides interfaces to easily search for and access stored trajectories for analyses.
Research intersection for C-ITS use cases
In addition to research on detailed traffic trajectories from a stationary system, the intersection is used for C-ITS related projects. The RSU enables us to retrieve and send C-ITS messages. Standardised messages such as Cooperative Awareness Message (CAM) and Collective Perception Message (CPM) contain information about the position and movement of the sending traffic participant or objects that it perceives. Typically, senders are connected vehicles but can also be other traffic participants. In the Bike2CAV project, a sensor bicycle (Boréal Holoscene Edge Bike) has been enabled to communicate its current movement via Cooperative Awareness Messages (CAMs). In this project, we have also developed a prototype of a cooperative collision risk detection and warning system using this communication approach. The prototype continuously receives the position of traffic participants at the intersection from different sources, including C-ITS messages from connected vehicles or bicycles and a stationary object tracking system. Then it predicts future movement of traffic participants, detects collision risks in real time and sends out warnings. The collision risk detection prototype has been realized as an application of FlowMotion. It assembles the data from different sources to trajectories and applies different algorithms. First, every trajectory is matched to the lane-accurate digital map of the intersection using Graphium’s HD Map-Matcher (see: https://github.com/graphium-project) to identify the current lane of an object. Then, the future movement is predicted using a graph search on the digital map to determine the possible paths for the corresponding object. This way, turning manoeuvres can be predicted even before any steering movement occurs. Afterwards, the predicted movement of trajectories is investigated for collision risks. In the case of a collision risk, a warning is generated and sent to traffic participants at the intersection via the R-ITS-S using a standardised Dezentralized Environmental Notification Message (DENM) and to an app for cyclists via cellular network.

Besides development and testing of C-ITS applications, Salzburg Research’s test intersection allows for evaluation of self-positioning and perception systems of automated vehicles. Movement data from the stationary LiDAR system can be compared to movement data acquired by onboard systems.
Conclusion
Our research intersection is a key component for many research topics in the context of collective perception as well as cooperative, connected and automated mobility (CCAM). On the one hand, it generates a large amount of high-quality historical movement data including all traffic participants’ movements at the intersection. On the other hand, it allows to develop and test real-time C-ITS applications.
If you are interested in the research intersection or in the specific expertise to analyse its data or to build C-ITS application, we are pleased to receive your message. We are open to scientific exchanges, research collaborations as well as contract research.